
直接®光电门用户手册
顺序代码:GDX-VPG
直接光电门用于测量通过门的物体的速度、加速度和时间。当红外光束穿过大门时,该物体会阻挡它。运动数据可以从波束阻塞的时间确定。
这种通用光门可以用于各种各样的实验在物理和物理科学类。例子包括
- 测量物体滚动的速度
- 自由落体的加速度测量
- 测量一辆小车在坡道上的加速度
- 研究钟摆摆动的
- 对旋转物体的周期进行计时
- 测量物体碰撞的速度
直接光电门是一种双栅传感器,它包括两个内置在传感器臂上的光门。这种配置允许精确的速度测量,而不需要知道任何关于物体的几何形状。当需要时,内部栅也可以单独用作传统的单栅光栅。直接光电门还包括用于与从传感器臂外通过的物体一起使用的单一激光门。使用激光门需要一个可见光笔激光器(不包括)。
直接光电门可以单独使用还是配合使用直接光电门s.一根可选配件电缆(订单编号:VPG-CB-GDX),可让您菊花链二直接光电门,以增加两门之间测量的定时精度。
注意:游标产品是为教育Manbetxapp手机用途而设计的。我们的产Manbetxapp手机品不用于任何工业、医疗或商业过程,如生命支持、患者诊断、制造过程控制或任何类型的工业测试。
包括什么
- 直接光电门
- 辅助杆
- 微型USB电缆
兼容的软件
选择下面的平台,查看其兼容性要求。
LabQuest
| 接口 | LabQuest应用 |
|---|---|
| LabQuest 3 | 全力支持 |
| LabQuest 2(停止) | 全力支持1 |
| LabQuest(停止) | 不兼容的 |
兼容性的笔记
- 该传感器无线连接到LabQuest 2需要一个直接蓝牙适配器当与较老的人一起使用时LabQuest 2模型.
电脑
| 软件 | |
|---|---|
| 接口 | 计算机图形分析应用程序 版本5.4 |
| 不需要接口 | 全力支持1 |
| LabQuest 3 | 全力支持2 |
| LabQuest 2(停止) | 全力支持23. |
兼容性的笔记
- 对蓝牙®只有运行Windows 10或Mac OS X 10.10或更新版本的电脑才受支持。计算机还必须有兼容的蓝牙4.0+收音机。
- 将这个传感器通过USB或无线蓝牙直接连接到电脑或Chromebook上®联系是最好的结果。另外,当LabQuest 2或LabQuest 3连接到电脑或Chromebook时,该传感器完全支持LabQuest 2或LabQuest 3无线数据共享.
- 该传感器无线连接到LabQuest 2需要一个直接蓝牙适配器当与较老的人一起使用时LabQuest 2模型.
Chromebook
| 软件 | |
|---|---|
| 接口 | 图形分析应用程序的Chrome 版本5.4 |
| 不需要接口 | 全力支持 |
| LabQuest 3 | 全力支持1 |
| LabQuest 2(停止) | 全力支持12 |
兼容性的笔记
- 将这个传感器通过USB或无线蓝牙直接连接到电脑或Chromebook上®联系是最好的结果。另外,当LabQuest 2或LabQuest 3连接到电脑或Chromebook时,该传感器完全支持LabQuest 2或LabQuest 3无线数据共享.
- 该传感器无线连接到LabQuest 2需要一个直接蓝牙适配器当与较老的人一起使用时LabQuest 2模型.
iOS
| 软件 | ||
|---|---|---|
| 接口 | 图形分析App for iOS 版本5.4 |
iOS GW 版本4.0.6 |
| 不需要接口 | 全力支持 | 不兼容的 |
| LabQuest 3 | 全力支持12 | 全力支持1 |
| LabQuest 2(停止) | 全力支持123. | 全力支持13. |
兼容性的笔记
- iOS和Android™设备只能通过LabQuest 2或LabQuest 3连接无线数据共享.
- 通过无线蓝牙将该传感器直接连接到受支持的移动设备®联系是最好的结果。
- 该传感器无线连接到LabQuest 2需要一个直接蓝牙适配器当与较老的人一起使用时LabQuest 2模型.
安卓
| 软件 | ||
|---|---|---|
| 接口 | 图形分析应用程序为Android 版本5.4 |
Android的图形分析GW 版本3.2 |
| 不需要接口 | 全力支持 | 不兼容的 |
| LabQuest 3 | 全力支持12 | 全力支持1 |
| LabQuest 2(停止) | 全力支持123. | 全力支持13. |
兼容性的笔记
- iOS和Android™设备只能通过LabQuest 2或LabQuest 3连接无线数据共享.
- 通过无线蓝牙将该传感器直接连接到受支持的移动设备®联系是最好的结果。
- 该传感器无线连接到LabQuest 2需要一个直接蓝牙适配器当与较老的人一起使用时LabQuest 2模型.
Python
| 软件 | |
|---|---|
| 接口 | Python |
| 不需要接口 | 全力支持 |
Javascript
| 软件 | |
|---|---|
| 接口 | Javascript |
| 不需要接口 | 全力支持1 |
兼容性的笔记
- 无线蓝牙®可以在任何平台上使用支持WebBluetooth的浏览器的Go Direct传感器进行连接。然而,只有少数操作系统进行了测试,而且测试是有限的。
虚拟仪器
| 软件 | |
|---|---|
| 接口 | 倪虚拟仪器 |
开始
有关平台相关的连接信息,请参阅以下链接:
www.cqlameng.com/start/gdx-vpg
蓝牙连接 |
USB连接 |
|
注意:这个传感器不能与原始的LabQuest一起工作。它适用于LabQuest 2或LabQuest 3。 |
充电传感器
连接附带的Micro USB电缆到直接光电门然后转到任何USB设备上两个小时。
你还可以最多收费8美元直接光电门我们正在使用我们的Go Direct充电站,单独销售(订单代码:GDX-CRG)。每个上面都有一个LED直接光电门显示充电状态。
| 充电 | 当传感器充电时,电池图标旁边的LED指示灯变为橙色。 |
| 完全充电 | 当传感器充满电时,电池图标旁边的LED指示灯为绿色。 |
驱动传感器
| 打开传感器 | 按一次电源按钮。当设备开启时,蓝牙图标旁边的LED指示灯闪烁红色。 |
| 将传感器置于睡眠模式 | 长按电源键3秒以上进入休眠模式。睡觉时LED指示灯不亮。 |
连接传感器
有关最新的连接信息,请参阅以下链接:
www.cqlameng.com/start/gdx-vpg
通过蓝牙无线技术连接
| 准备好连接 | 蓝牙图标旁边的LED指示灯在传感器唤醒并准备连接软件时闪烁红色。 |
| 连接 | 当传感器通过蓝牙与软件连接时,蓝牙图标旁边的LED指示灯闪烁绿色。 |
通过USB接口连接
| 连接和充电 | 当传感器通过USB连接到软件,设备正在充电时,电池图标旁边的LED指示灯为纯橙色,蓝牙指示灯旁边的LED指示灯熄灭。 |
| 连接,完全充电 | 当传感器通过USB连接到软件并充满电时,电池图标旁边的LED指示灯为绿色常亮,蓝牙图标旁边的LED指示灯熄灭。 |
| 通过USB充电, 通过蓝牙连接 |
当传感器通过蓝牙连接到软件,设备正在充电时,电池图标旁边的LED指示灯是纯橙色,蓝牙图标旁边的LED指示灯闪烁绿色。 |
识别传感器
使用Identify功能,在所连接的传感器上的蓝牙图标旁边闪烁LED指示灯。在图形分析中,识别从传感器信息访问。在LabQuest App中,通过点击传感器仪表,然后点击Go Direct来访问Identify。
使用该产品
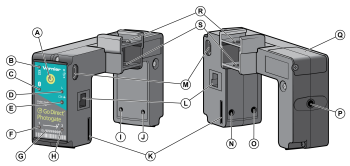
- 电源按钮
- 充电LED指示器
- 蓝牙LED指示器
- 激光栅LED指示灯
- 激光门光电二极管
- 1号门LED指示灯
- 传感器ID号
- Gate 2 LED指示灯
- 门1光电二极管
- 门2光电二极管
- 酒吧带指南
- 菊花链附件港口
- 微型usb端口
- 2栅红外发射极二极管
- 1门红外发射极二极管
- 线安装螺母
- 电池门
- 滑轮支架附着点
- 超滑轮连接点
传感器通道
按照本用户手册“入门”部分的步骤连接传感器。直接光电门具有多个传感器通道,提供各种数据选项,用于测量物体的运动。传感器通道包括
- 物体的速度
- 物体加速度(多个标志)
- 1号门-门状态
- 门2 -门状态
- 激光门-门状态
- 遥控门-物体速度
- 遥控门-物体加速度
- 1号门/遥控门-定时
- 激光门/远程门-定时
基于对象的传感器通道
基于对象的传感器通道是唯一的去直接光门。这些传感器通道采用双栅设计来测量速度和加速度。基于物体的通道测量不依赖于物体的几何形状或通过门的运动方向。
物体的速度
该通道是Go Direct Photogate的默认传感器通道。该通道报告了一个物体通过Go Direct Photogate臂的速度。这类似于在脉冲定时模式下使用一对传统的光门。
速度是通过找到与两个内部门的连续阻塞相关的时间间隔来计算的。这个时间间隔称为脉冲时间。内部栅极之间的距离(2.0 cm)与脉冲时间的比率被报告为物体速度的大小。一个物体先挡住1号门,然后又挡住2号门,就会报告速度为正。一个物体先挡住2号门,然后再挡住1号门,就会报告速度为负。速度测量可以显示为米/秒(默认),厘米/秒,或ft/s的单位。
“对象速度”的默认数据采集方式为“基于时间”。在收集数据时,记录速度及其相关的时间值。报告的时间值,称为时间中的速度,是通过平均用于脉冲时间计算的时间来确定的。您可以在同一个数据集中进行多次速度测量;但是,为了收集您想要的数据,可能需要调整实验持续时间。
带有多个标志的物体,如尖桩栅栏,在物体通过大门时,将报告每个标志的速度测量结果。在后面的旗帜进入大门之前,没有必要让一面旗帜完全穿过两个大门,比如使用游标车尖桩栅栏时。当报告多标记对象的速度时,会使用两个内部门对应的阻塞事件。
对于具有多个标志的对象,可以使用多个速度测量值的平均值来表示对象的平均速度。通过Velocity的最佳拟合直线的斜率vs。时间数据可以用来计算物体通过大门时的平均加速度。
物体加速度(多个标志)
该传感器通道报告具有两个或多个标志的物体在通过光门时破坏内部光门光束的加速度。这类似于在门-脉冲定时模式下使用一对传统的光门。
加速度计算使用速度和速度中期值为每个标志计算,如对象速度部分所述。每次旗子速度测量的差值与其相关的中间速度值的差值之比报告为该物体的加速度。加速度值可以以米/秒为单位显示2(默认),cm / s2或英尺/秒2.
“对象加速”的默认数据采集方式为“定时采集”。在收集数据时,记录加速度及其相关的时间值。报告的时间值,称为加速度中期,是通过平均用于加速度值计算的速度中期值来确定的。您可以在同一个数据集中进行多个加速度测量;但是,为了收集您想要的数据,可能需要调整实验持续时间。
带有两个以上旗子的物体,如尖桩栅栏,在通过大门时,将报告每对连续旗子的加速度测量结果。在后面的旗帜进入大门之前,没有必要让一面旗帜完全穿过两个大门,比如使用游标车尖桩栅栏时。当计算多标记物体的加速度时,使用两个内部门相应的连续标记速度测量。
对于具有两个以上标志的对象,可以使用多个加速度测量值的平均值来表示该对象的平均加速度。
使用基于对象的传感器通道的提示
- 为了确保获得精确的速度和加速度测量结果,你的物体应该从光栅臂外开始,并完全穿过光栅,而不是在穿过光栅的中途改变运动方向。如果不遵循这一点,所报告的数据可能不能准确地反映物体的运动。
- 我们不建议使用这些带有滑轮、轮子或条形胶带的传感器通道,因为这些物体不能在大门之外完全启动。
- 只有在第一个栅极被阻塞的一秒内,第二个栅极被阻塞时,速度测量才会显示出来。
- 加速度测量要求一个物体在通过光门时,有两个或多个“标志”破坏内部光门光束。
- 对于每一面旗帜来说,只有当第二道门在第一道门的1秒内被阻挡,以及当第二道门在第一面旗帜解除第二道门的1秒内被阻挡时,加速度才会显示出来。
- 基于物体的传感器通道的传感器仪表会随着物体通过Go Direct Photogate而更新;但是,除非您主动收集数据,否则测量结果不会存储在软件中。
- 对于基于对象的传感器通道,默认的数据采集方式为“Time-based”。当使用Photogate定时模式时,这些传感器通道没有记录值。
Gate-State传感器通道
门态传感器通道报告的数据与传统的photogate报告的数据相同。您可以使用这些传感器通道以及基于对象的传感器数据收集来探索和验证速度和加速度计算。门态通道可以与光门定时模式一起用于附加的数据采集选项,包括复制传统的光门数据采集实验。如果你想要求学生使用photogate数据进行手工计算,通道也可以在基于时间的模式下单独使用。
1号门-门状态
该传感器通道报告门状态的变化和门1的相关时间。
门2 -门状态
该传感器通道报告门状态的变化和门2的相关时间。
激光门-门状态
该传感器通道报告门状态的变化和与激光门相关的时间。选择这个通道会激活直接光门上的激光门。除激光门/远程门定时外,此通道不能与其他传感器通道一起使用。
使用激光门时,激光笔(不包括在内)必须对准激光门光电二极管(位于![]() 图标)上的直接Photogate。当激光没有对准或栅极被阻挡时,激光栅LED指示灯将是纯蓝色的。当激光栅传感器通道被选择,激光对准,栅极畅通时,激光栅LED指示灯熄灭。
图标)上的直接Photogate。当激光没有对准或栅极被阻挡时,激光栅LED指示灯将是纯蓝色的。当激光栅传感器通道被选择,激光对准,栅极畅通时,激光栅LED指示灯熄灭。
注意:它可能更容易调整激光的首选路径,然后放置栅极,使其与激光束对齐(激光栅LED指示灯关闭)。
使用门态传感器通道的提示
- 当只选择门态通道时,默认的数据采集模式设置为Photogate Timing。
- 阻塞事件的门状态值报告为1。
- 解除阻塞事件的门状态值报告为0。
- 使用门状态传感器通道的实验涉及线性或角运动计时(位置,速度和加速度测量),摆计时,和对象计时(门之间的时间)。
- 与阻塞事件相关的时间用于对象速度和对象加速度通道的脉冲时间计算。
- 射弹发射器Photogate Timing选项不能与Go Direct Photogate一起使用,因为传感器通道与射弹发射器的配置不一样。
- 当使用游标超滑轮附件(不包括)时,必须使用栅极2 -栅极状态传感器通道,因为滑轮不会阻塞栅极1。
Remote-Gate传感器通道
遥测门传感器通道是使用时,一个去直接摄影门是雏鸡链到第二个去直接摄影门或一个时间的飞行垫。使用这些通道需要附件电缆不包括在Go Direct Photogate。
当两个“Go Direct photogate”连接在一起时,你可以通过USB或蓝牙将其中一个连接到你的设备上®无线连接。一旦第一个栅极被连接,第二个栅极就成为连接的光栅的“远端栅极”。使用连接的传感器的远程门传感器通道设置远程门或飞行垫时间。
遥控门-物体速度
当两个去直接摄影门被雏菊连接在一起时,这个传感器通道报告远程门的物体速度值。有关报告数据的详细信息,请参见对象速度。
遥控门-物体加速度
当两个直接摄影门被雏菊连接在一起时,这个传感器通道报告远程门的对象加速度值。有关报告数据的详细信息,请参见对象加速(多个标志)。
1号门/遥控门-定时
该传感器通道报告连接门的1号门和雏菊链式远程门的1号门或飞行板时间连续阻塞事件之间的时间。这个脉冲时间不依赖于门阻塞的顺序,并且在第二个门阻塞的时候报告。
激光门/远程门-定时
该传感器通道报告连接门的激光门与雏菊链式远程门的1号门或飞行板时间之间连续的阻塞事件之间的时间。这个脉冲时间不依赖于门阻塞的顺序,并且在第二个门阻塞的时候报告。
选择这个传感器通道将激活Go Direct Photogate上的激光门。除激光门-门状态外,此通道不能与其他传感器通道一起使用。有关设置激光门的说明,请参阅激光门-门状态。
使用遥控门传感器通道的提示
- Remote-Gate传感器通道默认的数据采集方式为Time-based。当使用Photogate定时模式时,这些传感器通道没有记录值。
- 具有多个标志的对象将报告多个计时值。多个计时测量的平均值可用于表示物体在两门之间通过的平均时间。
- 你不能在菊花锁的遥控门上使用激光门。要使用两个在激光门模式下的Go Direct photogate来收集数据,将两个传感器直接连接到你的设备上。
- 您无法从雏菊链式的Remote Gate获得门状态数据。要在Gate-State模式下使用两个Go Direct photogate来收集数据,请将两个传感器直接连接到您的设备上。
Go直接光门实验
直接光电门S可以用于书中的几个实验物理与游标,高级物理与游标-力学,物理探索与项目.详细的实验请参阅这些书。这里有一些简单的例子,你可以用photogate做一些事情。
注意:附加设备不包括在直接光电门可能需要做这些实验。
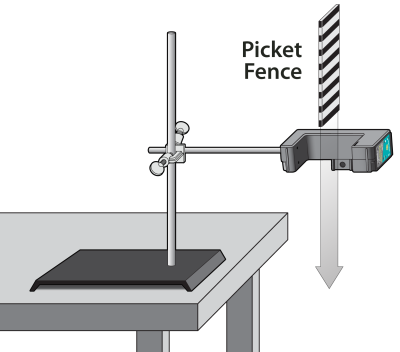
- 实验:用游标桩围栏测量自由落体中物体的重力加速度。
传感器通道:物体速度或物体加速度
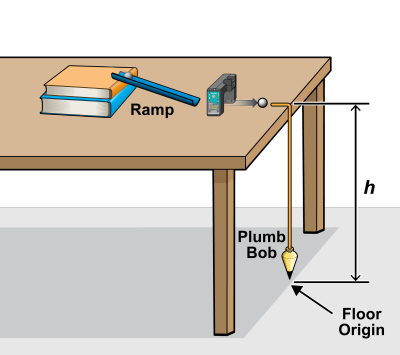
模式:基于时间的 - 实验:确定水平发射的炮弹的发射速度。
传感器通道:物体的速度
模式:基于时间的 - 实验:用Go Direct Photogate和time of flight Pad求出发射速度和飞行时间。
传感器通道:物体速度,1号门/远程门定时
模式:基于时间的 - 实验:时间的一个对象通过两个去直接摄影门(不是雏菊链)。
传感器通道:门1 -门状态,门2 -门状态,或激光门-门状态(在两个光门上)
模式:光门定时-门之间的时间或脉冲定时 - 实验:时间的对象之间通过两个雏菊链去直接摄影门。
传感器通道:1号门/远程门定时
模式:基于时间的 - 实验:求摆的周期。
传感器通道:门1 -门状态,门2 -门状态,或激光门-门状态
模式:光栅定时-钟摆定时 - 实验:在跳线者在地板上挡住光束的地方,用激光门测量跳线者的“悬挂时间”。(感兴趣的时间间隔是解除阻塞到阻塞的时间,将手工计算。)
传感器通道:激光门-门状态
模式:基于时间的 - 实验:测量加速度的阿特伍德或改装阿特伍德机器使用超滑轮附件。
传感器通道:门2 -门状态
模式:光门定时-线性运动或运动定时 - 实验:利用Go Direct光门和Go Direct力和加速度传感器研究脉冲和动量之间的关系。
传感器通道:物体的速度
模式:基于时间的 - 实验:使用两个Go Direct photogate(不是雏菊链)探索碰撞过程中的动量守恒。
传感器通道:物体速度(在两个photogate上)
模式:基于时间的 - 实验:探索碰撞过程中的动量守恒,使用两个雏菊链的Go Direct photogate。
传感器通道:物体速度和远程门-物体速度
模式:基于时间的 - 实验:研究向心力和加速度之间的关系,使用向心力仪器,去直接光门,和去直接力传感器。(开始收集数据前,质量必须旋转。)
传感器通道:门1 -门状态或门2 -门状态
模式:光门定时-角运动或运动定时 - 实验:用光栅胶带测量压缩空气火箭的加速度。
传感器通道:门1 -门状态或门2 -门状态
模式:光门定时-线性运动或运动定时 - 实验:验证对象速度通道的计算。
传感器通道:物体速度,门1 -门状态,门2 -门状态
模式:基于时间的 - 实验:验证物体加速度通道的计算。
传感器通道:物体加速度,物体速度,门1 -门状态,门2 -门状态
模式:基于时间的 - 实验:收集门态数据,手工计算光栅数据。
传感器通道:只有门1 -门状态,门2 -门状态和激光门-门状态通道
模式:基于时间的
越来越多的选择
以下是各种安装和使用的选择,去直接摄影门。环形支架,直角夹具,动态轨道,光栅支架,滑轮,滑轮支架,棒材胶带不包括在传感器中。
坐在光门臂上
安装在一个环站使用包括附件杆
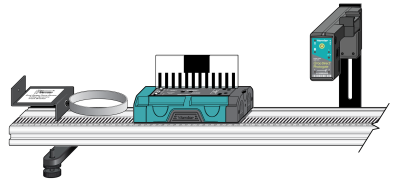
使用光栅支架安装在动态轨道上
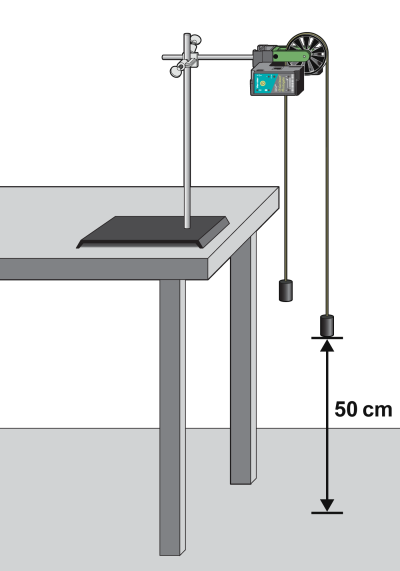
安装在带滑轮的环形支架上,包括辅助杆
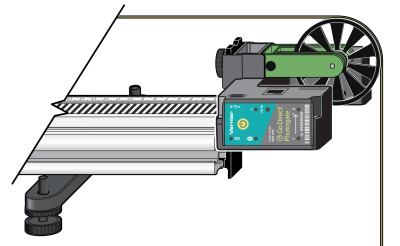
使用滑轮和滑轮支架安装在动态轨道上
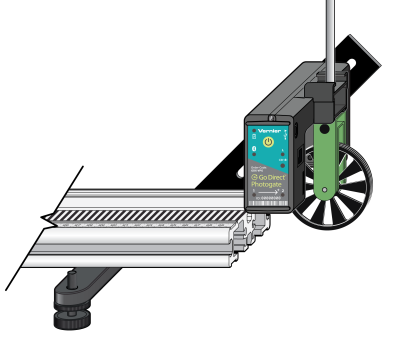
使用光栅支架和滑轮安装在动态轨道上
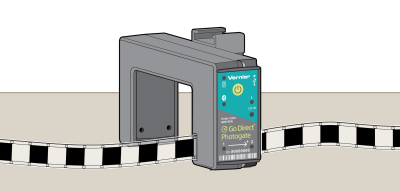
用于照相栅条胶带
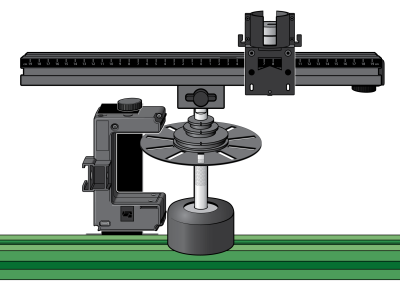
安装在原向心力仪上
规范
红外源 |
峰值在880 nm |
门的宽度 |
77.5毫米 |
门内部分离 |
20毫米 |
从内栅到光栅臂底部的距离 |
~ 10毫米 |
从内栅到光栅臂两侧的距离 |
~ 5毫米 |
栅1、栅2和激光栅LED指示灯 |
驶往畅通的大门 对堵塞的大门 |
电池 |
650毫安时锂poly可充电 |
电池寿命(一次充满电) |
~10小时连续数据采集 |
电池寿命(长期) |
~300次全充电周期(根据使用情况需要数年) |
安全
激光安全注意事项:使用“激光门”模式时,不要用肉眼对准外部激光门。遵循激光制造商指出的所有安全注意事项。
维护与保养
电池信息
直接光电门包含一个小型锂离子电池。该系统被设计为耗电量极低,对电池的要求不高。虽然电池的保修期为一年,但预计电池寿命应该是几年。可从游标更换电池(订单代码:GDX-BAT-650)。
保管和维护
来存储直接光电门长时间按下该按钮至少3秒,让设备进入睡眠模式。红色LED将停止闪烁,表示设备处于睡眠模式。几个月后,电池会放电,但不会损坏。这样储存之后,给设备充电至少两个小时,设备就可以使用了。
将电池暴露在超过35°C(95°F)的温度下将会降低其寿命。如果可能,将设备存储在一个不暴露于极端温度的区域。
水的阻力
直接光电门不耐水,不应浸入水中。
如果进水,请立即关闭电源(长按电源按钮3秒以上)。断开传感器和充电线,取出电池。在再次使用设备之前,请允许设备彻底干燥。不要试图使用外部热源干燥。
传感器的工作原理
传感器的一只手臂上有红外LED发射器,另一只手臂上有光电二极管。当红外光束穿过大门时,一个物体挡住了它。与光电二极管状态变化相关的时间用来计算物体的运动数据。
想要了解照片门是如何工作的,请参阅“照片门:仪器评估”,Eugene P. Mosca和John P. Ertel,点。期刊。57(9), 840-844(1989)。
故障排除
故障处理和faq请参见www.cqlameng.com/til/4197
维修信息
如果您遵循了故障排除步骤,但仍然遇到问题直接光电门,请联系游标技术支持support@vernier.com或拨打888-837-6437。支持专家将与您一起决定是否需要送去维修。届时,将会发布一个退货授权(RMA)号码,并就如何退货进行维修进行指示。
配件/替换
| 项 | 指令码 |
|---|---|
PF |
|
PF-CART |
|
水疗中心 |
|
磁带 |
|
激光 |
|
站 |
|
| 去直接Photogate定时电缆 | VPG-CB-GDX |
| 去直接时间的飞行垫电缆 | TOF-CB-GDX |
TOF-VPL |
|
gdx -蝙蝠- 650 |
|
CB-USB-MICRO |
|
CB-USB-C-MICRO |
|
ACC-ROD |
保修
这个产品的保修信息可以在支持选项卡上找到www.cqlameng.com/gdx-vpg/的支持
一般保修信息可以在www.cqlameng.com/warranty
处理
在处理此电子产品时,不要将其作为生活垃圾处理。其处置受到国家和地区不同的监管规定的制约。该物品应交给适当的回收点,用于回收电气和电子设备。通过确保该产品被正确处理,您可以帮助防止对人类健康或环境的潜在负面影响。材料的循环利用将有助于保护自然资源。有关回收此产品的详细信息,请联系您当地的城市办公室或您的处置服务。
电池回收资料可于www.call2recycle.org
请勿刺穿或使电池暴露在过热或火焰中。
 这里显示的符号表明,该产品不能被丢弃在标准的废物容器中。
这里显示的符号表明,该产品不能被丢弃在标准的废物容器中。
联络支持
填写我们的在线支持形式或者拨打我们的免费电话1-888-837-6437.